Work

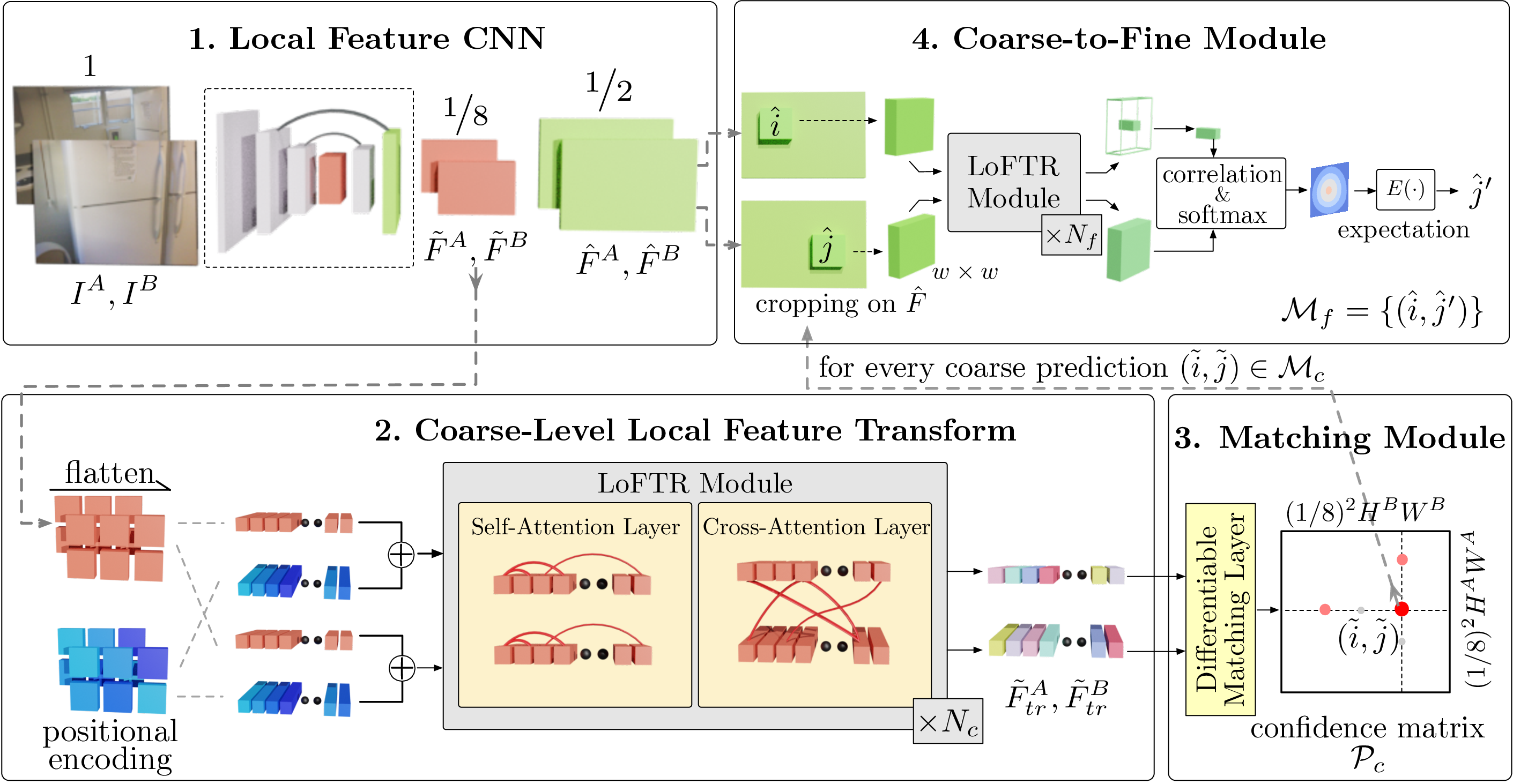
Deep Image Matching using Local Feature Transformer
Pose estimation pipeline to enable 3D reconstruction using Local Feature Transformer (LoFTR)
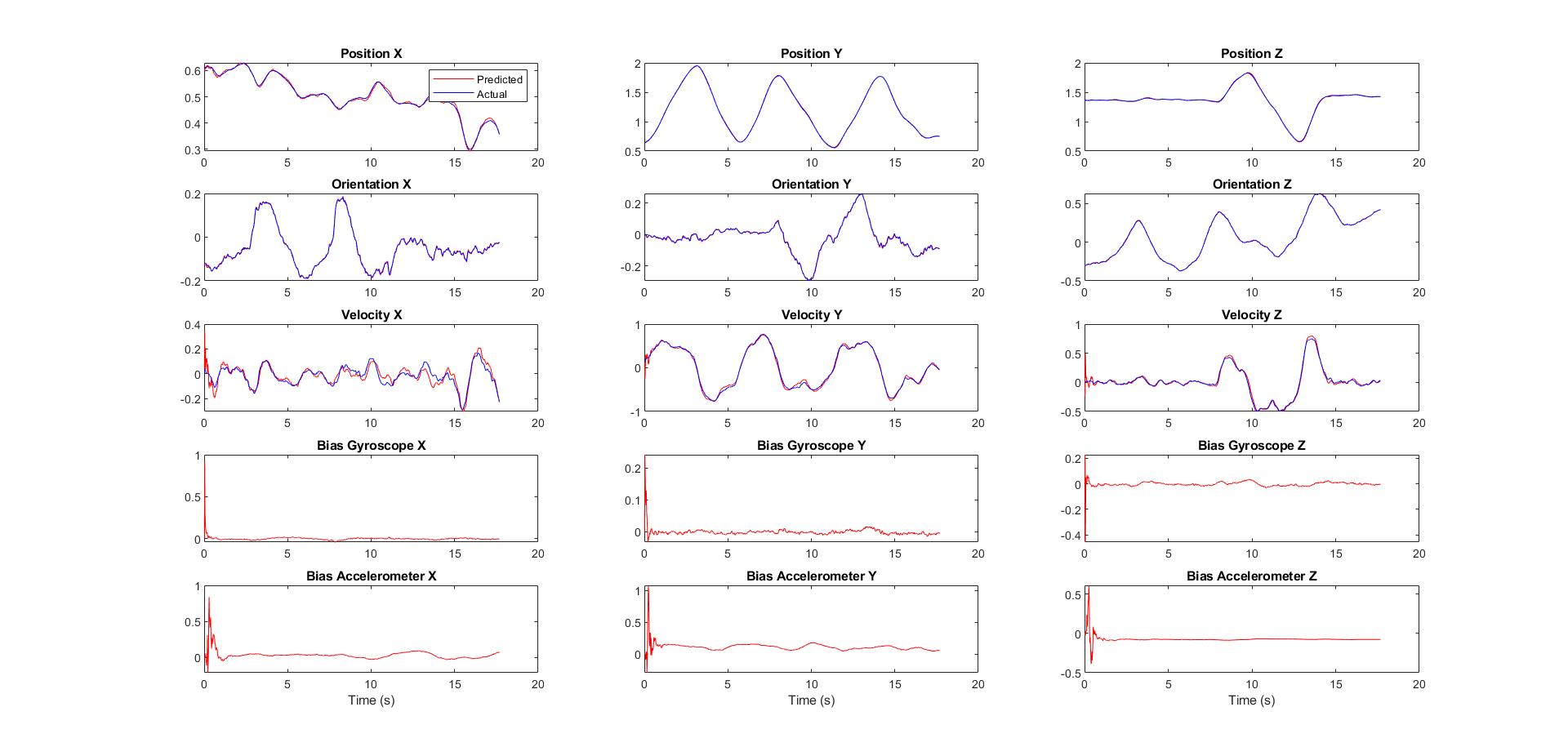
State Estimation of a Drone by Visual-Inertial Sensor Fusion
Optimal state estimation using extended & unscented kalman filter implemented using MATLAB
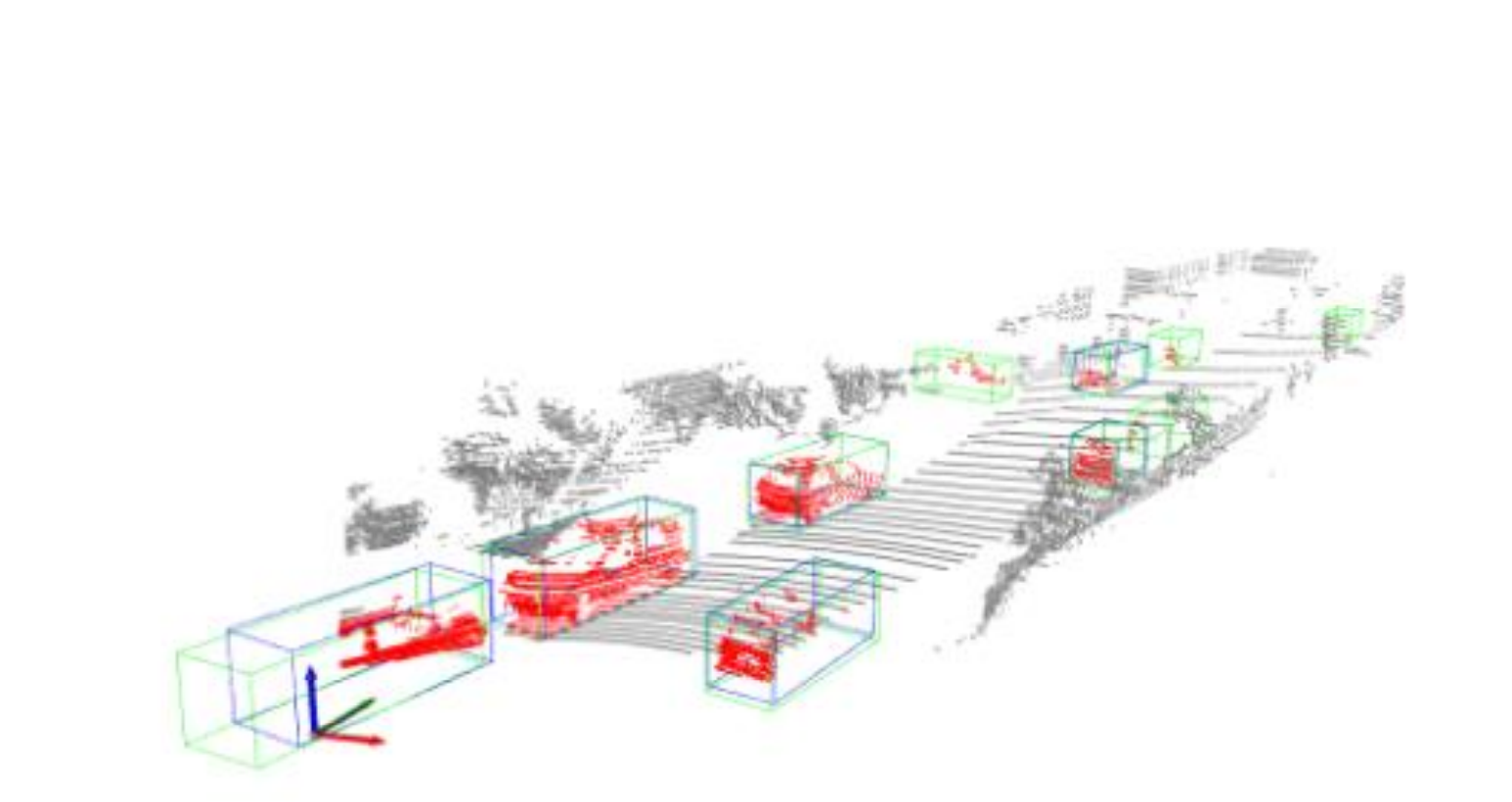
3D Object Detection in LiDAR Point Clouds
Benchmarking of LiDAR 3D Object Detection networks (VoxelNet, PointNet++, PointPillars) on KITTI Dataset.
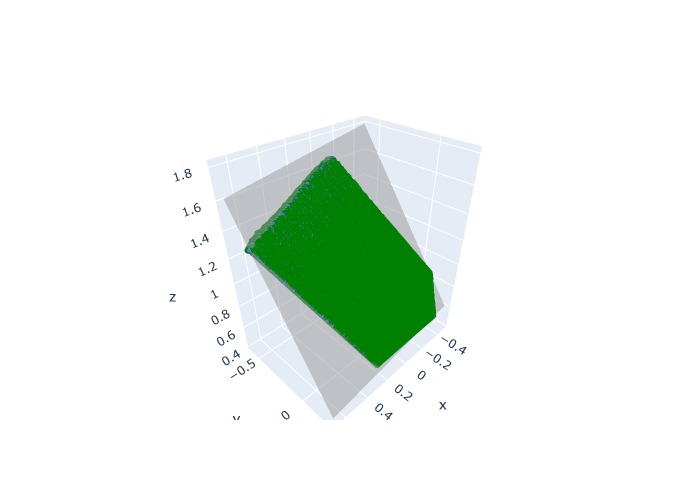
Fast Plane Extraction from a 3D Point Cloud
Fast, Parallel implementation of the RANSAC algorithm to segment a plane in a point cloud.